首页
论坛首页
windows系统
PC上传下载
PC其他软件
PC办公软件
PC压缩解压
PC图形图像
PC媒体播放
PC安全防护
PC文件管理
PC硬件程序
PC社交聊天
PC系统工具
PC操作系统
PC网页浏览
安卓系统
AD上传下载
AD动漫漫画
AD图像处理
AD小说阅读
AD影视播放
AD教育教学
AD社交娱乐
AD网页浏览
AD媒体处理
AD办公开发
AD系统工具
AD音乐软件
AD其他软件
软件合集
查看更多
圈内闲谈
站点事宜
文章日志
友情链接
抖音解析
宝藏资源
软件心愿
发布
发布文章
创建话题
创建版块
发布帖子
开通会员
开通赞助小会员
1. 全站大部分资源免费获取
2. 每日可免登录不限速直链下载5个资源
3. 创作现金收益分成比例60%
4. 推广反佣比例10%
5. 创作积分收益分成比例100%
6. 全站赞助小会员标识
开通赞助小会员
开通赞助大会员
1. 全站全部资源免费获取
2. 每日可免登录不限速直链下载20个资源
3. 创作收益分成比例80%
4. 推广反佣比例25%
5. 创作积分收益分成比例100%
6. 全站赞助大会员标识
开通赞助大会员
开通会员 尊享会员权益
登录
注册
找回密码
快速登录
QQ登录
首页
论坛首页
windows系统
PC上传下载
PC其他软件
PC办公软件
PC压缩解压
PC图形图像
PC媒体播放
PC安全防护
PC文件管理
PC硬件程序
PC社交聊天
PC系统工具
PC操作系统
PC网页浏览
安卓系统
AD上传下载
AD动漫漫画
AD图像处理
AD小说阅读
AD影视播放
AD教育教学
AD社交娱乐
AD网页浏览
AD媒体处理
AD办公开发
AD系统工具
AD音乐软件
AD其他软件
软件合集
查看更多
圈内闲谈
站点事宜
文章日志
友情链接
抖音解析
宝藏资源
软件心愿
开通会员 尊享会员权益
登录
注册
找回密码
快速登录
QQ登录
本站在新更新发布的资源中已加入免费网盘下载的渠道,会员用户则提供免登录不限速直链下载渠道
请Ctrl+D收藏本站永久域名www.8uid.com,加入官方QQ交流群:949181928
自动驾驶进展
共1篇
排序
更新
浏览
点赞
评论
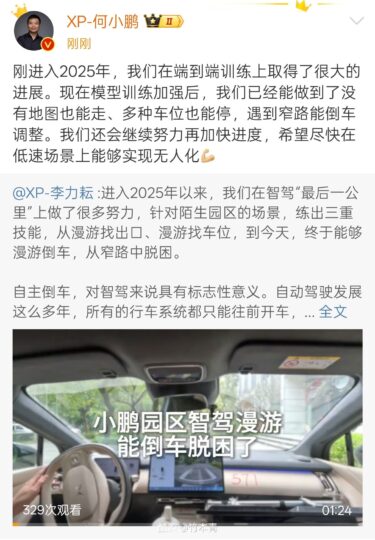
何小鹏透露小鹏汽车端到端训练取得突破,目标实现低速场景无人化
小鹏汽车创始人何小鹏近日表示,经过不断的技术进步和模型训练,小鹏汽车在自动驾驶方面已取得显著进展。他透露,经过模型的加强,目前的自动驾驶系统已能够在没有地图的情况下自主行驶,甚至能...
圈内闲谈
人民的骆驼
6个月前
0
44
0
登录
没有账号?立即注册
邮箱
验证码
发送验证码
记住登录
账号密码登录
登录
用户名或邮箱
登录密码
记住登录
找回密码
|
免密登录
登录
社交账号登录
QQ登录
使用社交账号登录即表示同意
用户协议
注册
已有账号,立即登录
设置用户名
邮箱
验证码
发送验证码
设置密码
注册
已阅读并同意
用户协议
加入QQ交流群
会员特惠活动,仅需39元/年,享免费获取直链下载,
点我查看详情
网站资源新增网盘链接下载,无需登录,无需付费
进群免费领取会员,点击下方按钮或
点击此处
加入QQ交流群
加入Q群